DCRemovalFilter (FPScript)
Supprime le décalage CC (DC bias) à l'aide d'un filtre passe-haut numérique (récursif).
Syntaxe
DCRemovalFilter(DataSet, [ CutOffFrequency = 0.01 ], [ SamplingRate ], [ Order = 1 ] [ , PhaseCorrection = True ])
ou
DCRemovalFilter(Result, [ CutOffFrequency = 0.01 ], [ SamplingRate ] [ , Order = 1 ])
La syntaxe de la fonction DCRemovalFilter se compose des éléments suivants :
Section |
Description |
||||||||
|---|---|---|---|---|---|---|---|---|---|
DataSet |
L'ensemble de données dont le décalage DC doit être supprimé. Les structures de données autorisées sont Séries de données, Matrice de données, Signal et Série de signaux. Tous les types de données numériques sont autorisés. Si l'argument est une liste, alors la fonction est exécutée pour chaque élément de la liste et le résultat est également une liste. |
||||||||
CutOffFrequency |
La fréquence de coupure du filtre passe-haut. La fréquence doit être comprise entre 0 et 0,25 (un quart du taux d'échantillonnage normalisé à un) ou entre 0 et 0,25 * SamplingRate. La fréquence de coupure est définie comme la fréquence à laquelle l'amplitude du filtre dépasse 70,7 % de l'amplitude du signal original. Les structures de données autorisées sont Scalaire. Tous les types de données réels sont autorisés, sauf Temps calendaire et Période de temps. La valeur doit être supérieure ou égale à 0. Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. Si l'argument n'est pas spécifié, il est défini à la valeur par défaut 0.01 . |
||||||||
SamplingRate |
Précise le taux d'échantillonnage. L'argument est facultatif. Si cet argument n'est pas précisé, une fréquence normalisée de 0 à 0,25 doit être spécifiée comme fréquence de coupure pour CutOffFrequency. Les structures de données autorisées sont Scalaire. Tous les types de données réels sont autorisés, sauf Temps calendaire et Période de temps. La valeur doit être supérieure à 0. Si l'argument est une liste, alors la fonction est exécutée pour chaque élément de la liste et le résultat est également une liste. |
||||||||
Order |
Précise l'ordre du filtre de suppression des DC. Les ordres de 1 à 5 sont autorisées. L'augmentation de l'ordre entraîne une augmentation de la pente du filtre passe-haut. Des ordres élevés peuvent cependant provoquer des instabilités numériques lorsque le filtre est utilisé avec une fréquence de coupure trop basse. Les structures de données autorisées sont Scalaire. Tous les types de données entiers sont autorisés. La valeur doit être supérieure ou égale à 1 et inférieure ou égale à 10. Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. Si l'argument n'est pas spécifié, il est défini à la valeur par défaut 1 . |
||||||||
PhaseCorrection |
La valeur TRUE précise que le filtrage comprend une correction de phase, ce qui signifie que la phase du signal filtré est la même que celle du signal d'entrée. Le filtrage a lieu deux fois dans ce cas : une fois en avant et une fois en arrière. Les structures de données autorisées sont Scalaire. Les types de données pris en charge sont Valeur booléenne. Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. Si l'argument n'est pas spécifié, il est défini à la valeur par défaut True . |
||||||||
Result |
Spécifie si les coefficients du filtre ou les pôles et les zéros du filtre sont renvoyés comme résultat. L'argument Result peut avoir les valeurs suivantes :
Si l'argument est une liste, alors son premier élément est pris. S'il s'agit à nouveau d'une liste, le processus est répété. |
Remarques
Le filtre correspond à un filtre passe-haut de Butterworth avec l'ordre spécifié Order et la fréquence de coupure CutOffFrequency. On peut aussi créer le filtre passe-haut Butterworth en utilisant la fonction IIRFilter.
Utilisez la première syntaxe pour supprimer le décalage directement des signaux. La structure du résultat correspond à celle de l'argument DataSet. Dans le cas des matrices de données et des séries de signaux, le calcul est effectué sur la base de chaque colonne. Si elles sont présentes, les composantes X ou Z sont copiées dans le résultat sans modification.
Utilisez la deuxième syntaxe pour renvoyer les coefficients du numérateur et du dénominateur du filtre sous la forme d'une liste avec deux éléments b et a, ou les pôles et les zéros du filtre. Les coefficients du numérateur et du dénominateur peuvent être utilisés pour calculer la réponse en amplitude du filtre en utilisant AmplitudeResponse ou la réponse en phase en utilisant PhaseResponse.
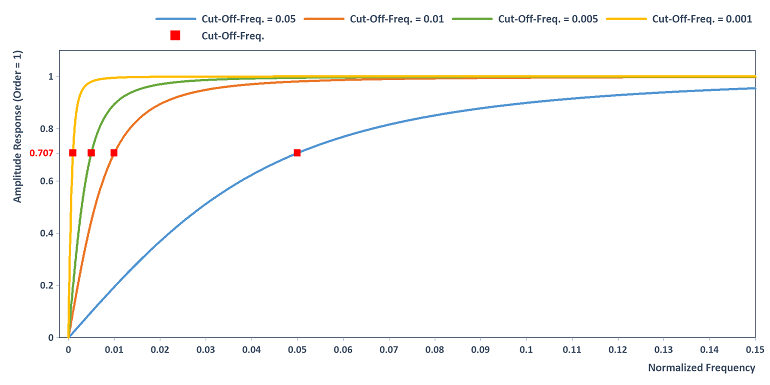
Le filtre a la réponse en amplitude suivante (Order = 1) pour différentes fréquences de coupure. La composante continue est filtrée et les fréquences supérieures à la fréquence de coupure sont transmises presque sans atténuation :
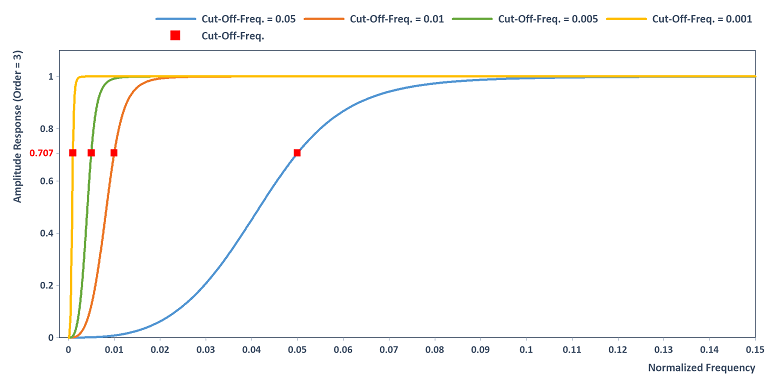
L'augmentation de l'ordre entraîne une augmentation de la pente du filtre passe-haut, par exemple en sélectionnant Order = 3 :
Remarque Pour le réglage par défaut Order = 1, le filtre est réduit à un filtre récursif commun du premier ordre pour supprimer le décalage DC, également connu sous le nom de Filtre Cascaded-Differentiation-Integration; voir [1, section 13.23] ou [2]. Interprétation de cette dénomination : Le Filtre Cascaded-Differentiation-Integration est formé d'une différenciation en inverse, suivie d'une intégration "fuyante" subséquente avec des constantes de rétroaction . Le différentiateur numérique supprime la composante continue, et l'intégrateur subséquent renvoie le signal d'entrée sans le décalage de la composante continue. Le Filtre Cascaded-Differentiation-Integration (CDI) a la règle de définition récursive suivante :
![]()
Le paramètre de l'intervalle [0, 1] peut être calculé uniquement par la fréquence de coupure normalisée ω de l'intervalle [0, 1/4] comme suit :
![]()
Disponible dans
FlexPro Basic, Professional, Developer Suite
Exemples
DCRemovalFilter(DataSet)
Supprime la polarisation DC d'un ensemble de données. La fréquence de coupure normalisée est généralement fixée à la fréquence normalisée de 0,01. Cela correspond à une fréquence de coupure d'un centième de la fréquence d'échantillonnage.
DCRemovalFilter(DataSet, 3 Hz, SamplingRate(Signal.X))
Supprime la polarisation DC d'un ensemble de données. La fréquence de coupure est fixée à 3 Hz. Il s'agit d'une fréquence maximale normalisée de 3 Hz / fréquence d'échantillonnage.
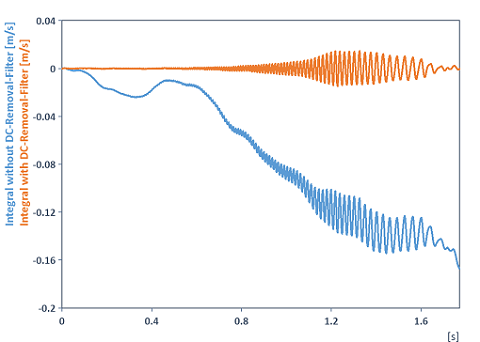
Integral(DCRemovalFilter(Signal))
Intègre un signal et supprime au préalable la dérive ou le décalage (composante continue). Raison : La raison de cette dérive du signal après l'intégration n'est pas seulement l'accumulation de décalage pendant l'intégration, mais aussi la réponse d'amplitude inversement proportionnelle de l'intégrateur (voir fonction Integral). Cela amplifie le bruit à des fréquences proches de l'offset (composante continue) et l'intégration l'élève à des valeurs arbitrairement élevées. La courbe intégrée dérive alors. Pour éviter cette dérive, il ne suffit pas de soustraire la moyenne, mais les fréquences proches de la composante continue doivent également être coupées à l'aide d'un filtre passe-haut. L'illustration suivante clarifie la situation (à titre d'exemple, un des signaux d'accélération des fichiers d'exemple FlexPro sous C:\Users\Public\Documents\Weisang\FlexPro a été intégré) :
Dim coeff = DCRemovalFilter(FILTER_COEFFICIENTSCASCADED, 0.01, , 3)
AmplitudeResponse(coeff, 100000)
Calcule la réponse d'amplitude (avec 100000 points de données) du filtre d'élimination du courant continu pour la fréquence de coupure normalisée de 0,01 et d'ordre 3 à l'aide de la fonction AmplitudeResponse.
Dim coeff = DCRemovalFilter(FILTER_COEFFICIENTSCASCADED, 0.01)
Filter(Signal, coeff, TRUE)
Les coefficients du numérateur et du dénominateur du filtre sont d'abord calculés, puis les données sont filtrées à l'aide de la fonction Filter. Le code est équivalent à : DCRemovalFilter(Signal).
Dim param = DCRemovalFilter(FILTER_POLESANDZEROS, 0.001, , 5)
Signal(Imag(param.Poles), Real(param.Poles))
Calcule les pôles des filtres pour la fréquence de coupure normalisée de 0,001 et d'ordre 5 et les renvoie sous forme de signal. Il convient de noter qu'un ordre trop élevé peut provoquer des artefacts numériques pour des fréquences de coupure trop basses. Les artefacts numériques sont conditionnés mathématiquement par le fait que les pôles du filtre sont sur le cercle unitaire ou s'en approchent très près. Par exemple, pour Order = 1 les pôles sont plus éloignés du cercle unitaire que dans le cas de Order = 5. Le filtre le plus stable numériquement est obtenu pour Order = 1.
Voir aussi
Analyse du signal - Objet d'analyse
Littérature
[1] Richard G. Lyons: Understanding Digital Signal Processing (3rd Edition). Prentice Hall,2011.ISBN 0-13-702741-9.
[2] Richard G. Lyons, Randy Yates: DC Blocker Algorithms. Dans: IEEE Signal Processing Magazine, Vol. 25, Issue 2. 2008.
Vous serez probablement intéressé par les articles suivants :
Vous êtes actuellement en train de consulter le contenu d'un espace réservé de Facebook. Pour accéder au contenu réel, cliquez sur le bouton ci-dessous. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informationsVous devez charger le contenu de reCAPTCHA pour soumettre le formulaire. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informationsVous êtes actuellement en train de consulter le contenu d'un espace réservé de Instagram. Pour accéder au contenu réel, cliquez sur le bouton ci-dessous. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informationsVous êtes actuellement en train de consulter le contenu d'un espace réservé de X. Pour accéder au contenu réel, cliquez sur le bouton ci-dessous. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informations